执行器设备
伺服放大器作为电动执行机构的关键控制单元,具体工作流程可分为三个关键阶段:信号综合与偏差检测:系统接收来自DCS或调节器的标准信号(4-20mA DC)后,前置磁放大器将输入信号与执行机构的位置反馈信号进行综合比较。磁放大器内部采用四组坡莫合金环结构,通过偏移绕组和反馈绕组实现信号叠加,产生与偏差成比例的电压信号。功率放大与驱动控制:当检测到偏差时,触发电路将偏差信号转换为晶闸管的触发脉冲。正偏差触发固态继电器导通,驱动电机正转;负偏差则触发反向回路,电机反转。新型伺服放大器采用过零触发固态继电器技术,既能输出高达150VA的驱动功率,又避免了电网污染。闭环动态调节:执行机构动作时,位置发送器实时将阀位转换为电阻或电流信号反馈至输入端。当反馈信号与输入信号的差值小于死区阈值(通常±1%)时,触发电路停止输出,电机进入制动状态。这种PID调节机制可使定位精度达到±0.5% FS,重复误差不超过±0.1%。电动执行机构广泛应用于电力、石油、化工等多个行业,确保了各种阀门和挡板的精确控制。执行器设备
角行程的阀门,如蝶阀和球阀,它们的工作原理决定了其动作是在90°范围内进行回转。因此,适用的是90°回转执行机构。在实际应用中,这类执行器的输出扭矩范围通常在50 - 3500N·m之间。这一扭矩范围是根据蝶阀和球阀在不同工况下的操作需求确定的。例如,在一些小型的水处理系统中,蝶阀可能只需要较小的扭矩就能正常开启和关闭,而在一些大型的化工流体传输管道中,球阀由于需要克服较大的流体压力和摩擦力,就需要更大的扭矩来确保可靠的操作。石油分体式执行机构技术某些特殊应用场景可能要求电动执行机构具备防爆性能以确保安全运行。

电动执行机构的选型流程中的参数计算环节。基于阀门的压差和摩擦系数进行扭矩的实测或理论计算是选型的基础。阀门在工作过程中,不同的工况会导致不同的压差,这个压差会对阀门的开启和关闭产生阻力。同时,阀门内部的摩擦系数也会影响到所需的扭矩大小。在计算出基本的扭矩需求后,还需要结合安全系数来选定执行器规格。安全系数的考虑是为了应对一些不确定因素,如阀门在长期使用过程中可能出现的磨损、堵塞或者其他异常情况。例如,在一个石油输送管道中的闸阀,由于石油的粘性较大,在计算所需扭矩时,除了考虑正常的压差和摩擦系数外,还需要预留一定的余量作为安全系数,以确保执行机构在各种情况下都能够可靠地驱动阀门。
电动执行机构扭矩/推力是一个极为重要的参数。在不同的工业应用场景中,阀门类型多种多样,像常见的球阀和闸阀。阀门的工作过程中,会承受一定的压差,这个压差会对阀门的正常操作产生影响。例如,对于150Ib球阀来说,它需要承受1.89MPa的压差。在实际计算所需扭矩时,不能只依据这个压差数值,还需要考虑到安全因素。为了确保执行机构在运行过程中不会出现过载现象,我们通常需要将计算得到的扭矩乘以1.5倍的安全系数。这样,执行器输出的扭矩就必须大于根据压差计算出来的值。这就好比一辆汽车在爬坡时,发动机需要提供足够的动力,这个动力要能够克服车辆自身的重力和坡面的摩擦力,还要预留一些余量,以应对可能出现的突发状况,如路面的颠簸或者突然增加的阻力。为了满足个性化需求,部分制造商提供定制化服务,可以根据客户要求调整尺寸和功能配置。
电动执行机构的动力系统采用三相或单相交流电机驱动,其工作原理基于电磁感应原理,定子绕组通过交变电流产生旋转磁场带动转子输出机械能。减速器作为关键传动部件,主要分为行星齿轮和蜗轮蜗杆两种形式:行星齿轮减速器通过多级行星轮系实现高精度分流传动,特别适用于大扭矩输出场景;蜗轮蜗杆结构则利用斜齿啮合特性,可达到50:1以上的减速比,同时具备自锁功能防止反转。减速机构内部通过涡轮蜗杆组将电机的高速旋转转换为低速高扭矩输出,配合丝杆螺母机构进一步将旋转运动转化为直线位移(直行程),或通过扇形齿轮组实现0-90°角度旋转(角行程)。不同阀门类型对应不同传动结构:闸阀、截止阀等需要多回转运动(通常900°-1800°)的阀门采用蜗轮蜗杆减速系统,而球阀、蝶阀等只需部分回转(90°-120°)的阀门则配备行星齿轮系统。电动执行机构是一种将电能转换为机械运动的装置,主要用于工业自动化系统中。石油分体式执行器生产商
电动执行机构内部的关键组件包括电动机、减速器以及限位开关等。执行器设备
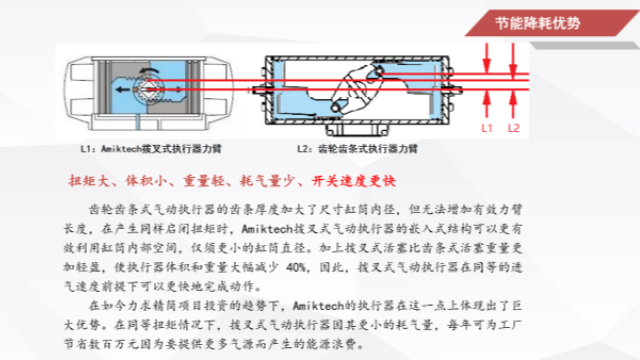
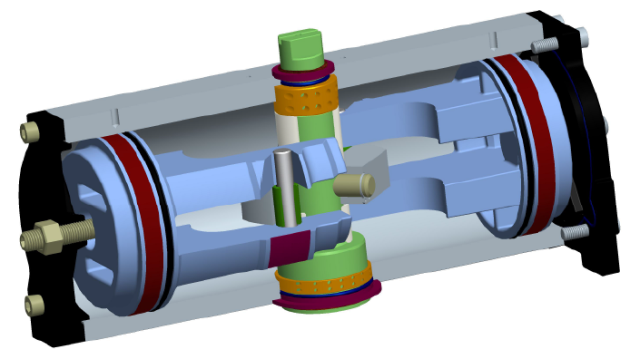
拨叉式气动执行机构的工作原理是压缩空气进入气缸,推动拨叉式的活塞运动,通过拨叉盘将活塞的直线运动转为圆盘的旋转运动,圆盘再带动输出轴转动,从而实现对阀门的开关控制。拨叉盘的运动方式是旋转运动。圆盘与拨叉、传动销与圆盘均通过销连接,圆盘尺寸可以趋近缸径,拨叉与圆盘连接的销接近圆盘边缘,因而能以较小的尺寸获得较大的扭矩。同时,圆盘的结构独特,其与销连接处有特殊曲线式设计,旋转时的扭矩特性与蝶阀、球阀启闭所需扭矩特性相符。执行器设备
- 风电特高频局放检测仪设备 2025-07-30
- 国产固定式压缩箱设备 2025-07-30
- 石油拨叉式执行器控制器 2025-07-30
- 大容量智能压缩箱产品 2025-07-30
- 化工执行机构多少钱 2025-07-30
- 化工阀门执行机构厂家 2025-07-30
- 国产水泵紧固不松动螺栓多少钱 2025-07-30
- 局放检测仪探头 2025-07-29
- 石油拨叉式执行机构模块 2025-07-29
- 国产移动式压缩箱应用 2025-07-29
- 陕西履带式高空作业平台参考价 2025-07-30
- 河南小袋投料粉粒体卸料设备哪家好 2025-07-30
- 上海洗脱机公司 2025-07-30
- 安徽乘客电梯轿厢 2025-07-30
- 甘肃蒸发冷空调 2025-07-30
- 内蒙古浆液泵循环泵 2025-07-30
- 河南升降车厂家供应 2025-07-30
- 中山台达变频器VFD900CP43L-00 2025-07-30
- 镇江重型皮带输送机技术参数 2025-07-30
- 安徽微型玻璃钢风机厂家批发价 2025-07-30