福建自动驾驶MBD开发费用
轨道交通控制系统MBD全流程解决方案覆盖从需求分析到现场调试的完整开发周期,适配列车牵引、制动、信号联锁等系统的研发需求。需求阶段通过可视化建模将功能需求转化为可量化的模型元素,建立“需求-模型-测试”的追溯链。设计阶段支持列车网络系统(TCN)建模,构建MVB/WTB总线的通信协议模型,仿真不同工况下的数据传输延迟与可靠性,优化总线拓扑结构。控制算法开发中,可搭建牵引变流器控制、制动防滑算法的图形化模型,通过仿真验证不同速度曲线下的控制效果,确保列车运行的平稳性与能耗优化。测试阶段整合硬件在环(HIL)测试平台,将控制模型与物理控制器对接,模拟轨道电路、道岔等现场设备的反馈信号,验证系统在故障工况下的安全响应。解决方案还包含模型维护与版本管理工具,支持列车全生命周期内的控制算法迭代优化,为轨道交通控制系统的安全高效开发提供多方位支撑。基于模型设计用途广,能贯穿开发全流程,助力需求验证与功能优化,提升开发效率。福建自动驾驶MBD开发费用

工业自动化领域模型驱动开发(MBD)的优势主要体现为缩短产品上市周期、提升系统可靠性与适配柔性制造需求。在工业机器人开发中,MBD允许工程师通过动力学模型直接设计控制算法,无需反复调试物理样机,通过模型仿真可快速验证不同工况下的运动精度与负载能力,大幅缩短控制算法开发周期。针对数控机床,MBD能构建切削参数与加工质量的关联模型,通过仿真优化进给速度、主轴转速等参数,减少试切次数,提升加工效率与产品一致性。MBD的模块化建模特性适配柔性制造需求,生产线适配新工件时,可通过修改模型参数快速调整控制逻辑,无需重新编写大量代码,增强生产线灵活性。此外,MBD支持控制算法与物理设备的虚拟集成,在系统部署前通过仿真发现控制逻辑与硬件特性的不匹配问题,降低现场调试难度与风险,提升工业自动化系统的可靠性。云南基于模型设计服务价格基于模型设计可运用于汽车、航空、工业等多领域,覆盖控制与仿真相关的开发环节。

汽车控制器软件MBD服务商的推荐,需重点考察其在控制器开发全流程的技术支撑能力。服务商应能提供从需求分析到代码生成的完整解决方案,在发动机控制器ECU开发中,可协助构建燃油喷射、点火控制的精细化模型,支持不同工况下的控制策略仿真验证。针对整车控制器VCU,服务商需具备能量管理策略建模经验,能整合电机、电池参数,模拟混动模式切换时的动力平顺性,优化扭矩分配算法。在工具链支持方面,应熟悉主流MBD工具的应用特性,能指导工程师完成模型在环(MIL)、软件在环(SIL)到硬件在环(HIL)的全流程测试,确保模型与代码的一致性。推荐的服务商还需具备功能安全工程经验,拥有丰富的车型项目案例,验证其在不同控制器开发场景中的适配能力。甘茨软件科技通过了ISO26262道路车辆安全管理体系ASIL-D认证,作为AUTOSAR组织开发合作伙伴,在汽车控制器软件MBD服务中具备专业优势,可提供贴合行业需求的技术支持。
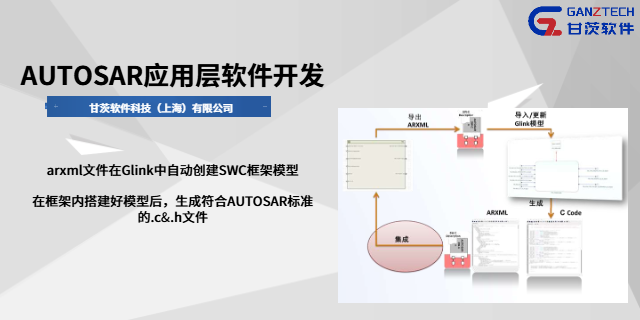
汽车控制器软件MBD好用的软件需具备符合行业标准的建模环境与全流程支持能力。功能上,应支持基于AUTOSAR标准的模块化建模,提供丰富的汽车控制算法库(如发动机控制、底盘控制模块),便于快速搭建ECU、VCU等控制器的软件架构。代码生成能力至关重要,需能支持代码与模型的双向追溯,确保一致性。测试验证工具需集成需求管理、覆盖率分析功能,支持模型在环与硬件在环测试的无缝衔接,验证控制算法在不同工况下的有效性。好用的软件还应符合ISO26262功能安全标准,提供功能安全分析工具,助力控制器软件通过认证,同时具备良好的兼容性,能与主流的仿真平台、测试设备对接,提升开发流程顺畅性。甘茨软件科技通过了ISO26262道路车辆安全管理体系ASIL-D认证,作为AUTOSAR组织开发合作伙伴,其相关软件可应用于汽车控制器软件MBD开发中。车载通信系统建模靠MBD方法,能模拟不同路况通信状态,让系统更稳定可靠。
汽车领域基于模型设计(MBD)的优势体现在开发效率、质量控制与多域协同三个维度。开发效率方面,MBD以图形化建模替代传统手写代码,使工程师可专注于控制算法设计,通过模型在环(MIL)仿真早期发现逻辑错误,减少后期测试阶段的修改成本,行业实践表明采用MBD可使汽车电子控制器开发周期有所缩短。质量控制层面,MBD支持从需求到模型的追溯性管理,每个模型元素均可关联具体需求项,便于测试用例设计与覆盖率分析;自动代码生成工具能消除手动编码的人为错误,明显降低代码缺陷率。多域协同上,MBD采用标准化模型格式,使电子、机械、控制等领域工程师可基于同一模型开展工作,如新能源汽车三电系统开发中,电池、电机、电控模型可无缝集成实现跨领域联合仿真,提升系统级优化效率。此外,MBD支持开发全过程的持续验证,确保产品符合设计需求与行业标准。飞行器控制系统设计MBD国产平台,能支撑姿态控制建模与仿真,助力飞控系统研发。山西系统建模好用的软件
工业自动化领域MBD开发优势明显,能准确调参数,联调仿真让机器更稳,周期更短。福建自动驾驶MBD开发费用
机器人领域基于模型设计(MBD)工具需适配多域控制特性,涵盖动力学建模、控制算法设计与代码生成功能。动力学建模工具应能构建机械臂DH参数模型,自动计算运动学正逆解,模拟不同关节角度下的末端位置,支持重力补偿、摩擦力矩等动力学特性分析,为控制算法设计提供精确植物模型。控制算法设计工具需具备图形化建模能力,支持PID控制、模型预测控制(MPC)等算法的搭建与仿真,可快速验证轨迹跟踪、力控柔顺等控制策略效果——如协作机器人开发中,能模拟人机交互时的力反馈控制逻辑。代码生成工具需能将控制模型转化为可在ROS/RTOS等机器人控制器上运行的实时代码,支持代码优化以满足毫秒级甚至微秒级控制周期需求。此外,支持多工具联合仿真的工具更具优势,能实现动力学模型与控制算法模型的无缝集成,验证整个机器人系统的动态响应,保障MBD流程的连贯性与有效性。福建自动驾驶MBD开发费用
- 西藏智能基于模型设计优势有哪些 2025-07-13
- 天津图形化建模MBD的开发优势 2025-07-13
- 长春科学计算软件价格 2025-07-13
- 湖北图形化建模系统建模哪个软件性价比高 2025-07-13
- 山西智能系统建模服务商推荐 2025-07-13
- 广东低成本科学分析有哪些靠谱平台 2025-07-13
- 安徽新能源汽车电池基于模型设计好用的软件 2025-07-13
- 上海图形化建模基于模型设计好用的软件 2025-07-13
- 天津工业控制MBD服务价格 2025-07-13
- 西藏MBD全流程解决方案 2025-07-13
- 浙江官方授权经销DC380卡片打印机咨询报价 2025-07-13
- 上海量产的星闪模块榜单 2025-07-13
- 轻量化钣金加工高效协同制造解决方案咨询 2025-07-13
- 江苏低代码SRM系统有哪些公司 2025-07-13
- 湖南数据文件加密系统 2025-07-13
- 国产电子产品开发报价 2025-07-13
- 常州省电智慧用电收费 2025-07-13
- 安徽专业的文件加密 2025-07-13
- 3450VSIDatalogic得利捷无线扫描枪 2025-07-13
- 佛山行车记录仪摄像头厂家现货 2025-07-13