广州自动跟随视觉点胶系统费用
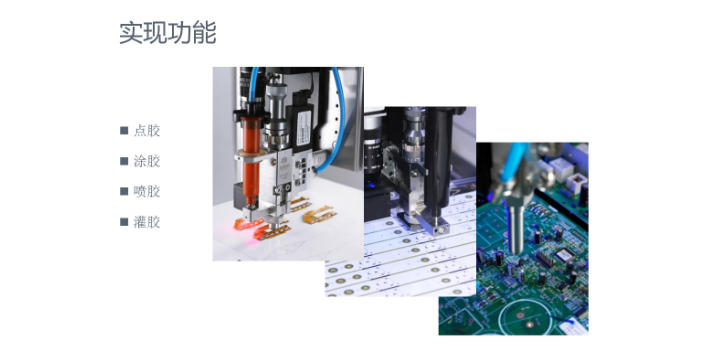
视觉点胶系统在对小型器件进行点胶时具有优异的性能。因为小型器件的尺寸比较小,需要在精度上更高的要求下进行点胶工作,而传统的手动点胶容易产生误差和不均匀的胶水施加。而视觉点胶系统则能够通过它的图像分析和处理功能,及时进行精确定位和胶水施加,避免了传统手工点胶的问题。视觉点胶系统采用高分辨率摄像头和辅助光源进行图像采集和处理,并能够对小型器件进行高精度的定位和胶水施加。在此过程中,视觉点胶系统能够根据工件的大小、形状、位置等信息,准确地控制胶水的流量和流速,避免了胶水过多或过少的情况发生。以手机点胶为例,视觉点胶系统能够快速准确地完成手机屏幕边框、摄像头、听筒等零部件的点胶工作。视觉点胶系统优化出胶控制,支持多种工艺参数设置,避免拉丝、滴胶等不良现象。广州自动跟随视觉点胶系统费用
操作人员在设置视觉点胶系统的相关参数时,需要考虑以下几个因素:产品要求:根据具体的点胶产品要求,包括涂胶位置、胶水体积、涂胶路径等方面的要求。操作人员需要了解产品的设计要求,以便正确设置视觉点胶系统的参数。工艺要求:不同的点胶工艺需要需要不同的参数设置。例如,点胶速度、压力、烘烤时间等。操作人员需要根据具体的工艺要求设置相关参数,以确保点胶质量和效率。图像处理:视觉点胶系统利用图像处理技术进行图像分析和特征识别。操作人员需要了解图像处理算法的原理和参数设置的意义,以便根据实际情况进行调整。例如,图像的亮度、对比度、滤波等参数可以影响点胶系统的性能。环境因素:操作人员还需要考虑工作环境的光照条件、背景干扰等因素。这些因素需要会影响图像的质量和准确性,从而影响点胶系统的性能。操作人员可以根据实际情况进行光源调整、背景处理等操作,以提高系统的稳定性和精度。上海全景单工位视觉点胶系统解决方案视觉点胶系统支持多规格产品快速切换功能,大幅提升生产灵活性。
流水线视觉点胶系统:它是一款专门适用于流水线点胶作业的系统,完美实现设备厂商要求的“左进右出”加工模式,即流水线左侧自动进料,中间加工,右侧出料。它比较大的特点就是同步控制点胶产品的运动速度,与高速点胶阀完美配合,能够切换自如地应对不同路径的点胶。适用于产品批量点胶加工,可一直保持运动,定位准确,工件可随意摆放,支持CAD编辑及导图,多产品混合加工(不同高度、不同尺寸),既能实现像机械手一样可实现高自由度、全方面无死角的点胶作业,又能轻松实现与现有产线的无缝对接。
视觉点胶系统在零部件的精确组装方面有一些要求,以确保高质量和准确性的组装结果。下面是一些常见的要求:零部件位置精度:视觉点胶系统需要准确确定待点胶零部件的位置,包括位置坐标和姿态。这可以通过视觉技术来实现,通过图像处理和特征识别来精确测量和确定零部件的位置。零部件固定性:在点胶过程中,待粘合的零部件需要保持固定,确保点胶位置的准确性。这需要需要使用夹具、工装或其他固定装置来保持零部件的稳定性。表面清洁度:点胶前,零部件的组装表面应该清洁,确保没有灰尘、油脂或其他污染物。这有助于胶水的粘附和附着力,并减少胶水与杂质的相互作用。视觉点胶系统实时监测点胶过程,异常情况及时报警并停机。
视觉点胶系统可以通过以下几种方式来提高准确性:高精度传感器:使用高精度的视觉传感器可以提供细致的图像信息,从而准确地识别目标位置和形状。增加相机分辨率:提高相机的分辨率可以捕捉更多的细节信息,减小图像畸变和误差。优化光照条件:适当的照明条件可以提高图像的质量,减少光照变化对图像分析的影响。使用适当的算法:选择合适的图像处理和分析算法,如边缘检测、拟合曲线等,可以更准确地提取目标的形状和位置信息。校准和校正:对视觉系统进行周期性的校准和校正,以确保传感器和设备之间的准确对齐,并使系统保持在较好工作状态。引入机器学习方法:通过使用机器学习方法,可以训练模型来学习并预测目标的位置和形状,从而提高系统的准确性。视觉点胶系统支持多种通信协议,实现与其他设备的数据交互。R轴旋转视觉点胶系统制造商
视觉点胶系统支持中英语言操作界面,方便不同地区使用。广州自动跟随视觉点胶系统费用
视觉点胶系统是工业机器人应用中非常重要的一环,为了优化这一过程,可以考虑以下几个方面:选用合适的硬件设备:视觉点胶系统需要高清晰度的摄像头、快速的图像处理器、高精度的运动控制器等硬件设备。因此,选用合适的硬件设备是优化视觉点胶系统的首要条件。控制系统优化:视觉点胶系统需要高速、高精度的运动控制器对机器人进行控制。通过对控制系统进行优化,可以提升机器人的运动精度和速度,从而提高视觉点胶系统的效率和稳定性。图像处理算法优化:图像处理算法是视觉点胶系统的关键。优化图像处理算法可以提高视觉系统的鲁棒性和准确性,降低误判率,提高点胶效率。涂胶参数优化:根据不同的涂胶需求,合理设置涂胶参数,如涂胶速度、涂胶量、涂胶时间等,可以有效降低涂胶的误差率,提高涂胶质量。广州自动跟随视觉点胶系统费用
- 东莞全景单工位视觉点胶系统配置 2025-06-04
- 广州大视野视觉点胶系统公司电话 2025-06-04
- 中山标准视觉点胶系统方式 2025-06-04
- 东莞三轴视觉点胶系统服务 2025-06-04
- 中山视觉点胶机系统费用 2025-06-04
- 深圳自动化视觉点胶系统非标定制 2025-06-04
- 佛山高精视觉点胶系统供应商 2025-06-04
- 广州单平台视觉点胶系统配置 2025-06-04
- 杭州灌胶机视觉点胶系统供货商 2025-06-04
- 深圳五轴旋转视觉点胶系统服务商 2025-06-04
- 吉林刚玉辊式破碎机哪家好 2025-06-04
- 节能冷却塔哪里能买 2025-06-04
- 新款专业生产三相电机联系方式 2025-06-04
- 温州大型卷筒加工 2025-06-04
- 湛江链式输送机电话 2025-06-04
- 杭州镀锌发黑大圆头马车螺栓 2025-06-04
- 西藏简易手持纸箱激光打标机销售厂家 2025-06-04
- 黑龙江大功率电动推杆 2025-06-04
- 横流闭式冷却塔联系人 2025-06-04
- 广东靠谱的人工智能应用软件开发 2025-06-04