中山全景单工位视觉点胶系统制造商
视觉点胶系统通过使用相机和图像处理算法实时检测工件表面的特征。以下是一般的工作原理:相机采集图像:系统中的相机负责将工件表面的图像捕捉下来。相机可以设置在点胶头旁边或其它合适的位置,以获得较好的视野和对工件表面的清晰成像。图像处理:通过对相机捕获的图像进行处理,包括图像滤波、光照校正、边缘检测、图像分割等步骤,提取出工件表面的特征。这些特征需要是形状、轮廓、颜色、纹理等信息。特征提取和分析:经过图像处理后,系统会对特定的特征进行提取和分析。这可以包括测量工件的尺寸、位置、角度,检测表面缺陷或异物等。特征匹配和定位:视觉点胶系统需要需要根据工艺要求将胶水精确地点在特定的位置或图案上。通过特征匹配和定位算法,系统可以将检测到的特征与预定义的目标特征进行对比,从而确定较好的点胶位置。视觉点胶系统支持MES通讯协议,方便与各类设备组网协作。中山全景单工位视觉点胶系统制造商
视觉点胶系统的日常维护:"1.定期清洁和检查镜头,可以使用的清洁布或者棉签轻轻擦拭镜头表面,以及定期检查相机镜头是否固定稳固且垂直于加工台面。2.定期检查光源,点胶视觉系统需要光源来提供足够的光亮度与均衡度,因此需要定期检查灯光状况3.定期校准系统:更换点胶阀、挪动设备或长时间使用后,可能会出现偏差,因此需要定期校准系统。4、定期检查连接线路:检查连接线路没有松动或者接触不良的情况,避免出现故障。"定期进行维护和保养,可以保证点胶视觉系统的稳定性和性能,延长设备使用寿命。 上海大视野视觉点胶系统公司电话视觉点胶系统集成智能软件,操作简便,新手也能快速上手。
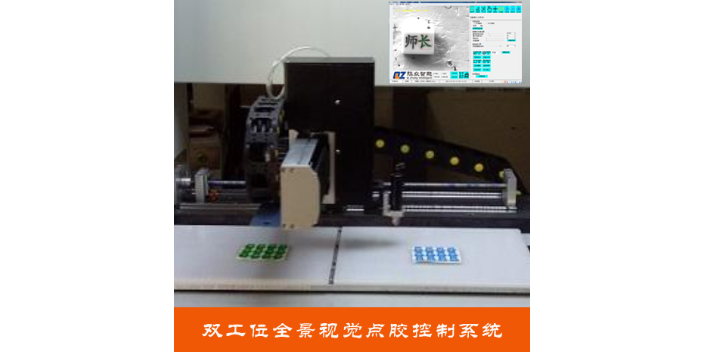
全景+局部双重视觉定位视觉点胶系统是一种结合了全景视觉系统和局部视觉系统的点胶定位方案。它的原理是通过两个不同的视觉系统协同工作,实现对工件的准确定位和点胶操作。全景视觉系统是系统的主要部分,它通常由一个或多个摄像头组成,用于获取工作环境中的全景图像。这些摄像头安装在固定位置,可以涵盖整个点胶工作区域。全景视觉系统使用高效的图像处理算法对全景图像进行分析和处理,提取出工件的整体特征和位置信息。局部视觉系统是系统的辅助部分,通常由一个或多个激光传感器、摄像头或其他高精度传感器组成。它们用于对工件进行更细致的检测和定位。局部视觉系统能够获取工件的局部特征,如边缘、孔洞、标记点等,并提供更高精度的位置信息。在工作过程中,全景视觉系统首先获取全景图像,并使用图像处理算法进行特征提取和目标识别,确定工件的大致位置和姿态。然后,局部视觉系统辅助进行更准确的定位,通过对工件进行细致的检测和分析,提供更精确的位置信息。
视觉点胶系统哪个牌子好:"1、可以在网上做相关了解,了解公司的成立时长、发展历程、发展方向、公司规模、行业口碑等;建议可以选与自己需要实现效果相关的点胶机控制系统;2、公司的研发实力和团队,确保售后可以得到立即处理,能够线下和线上及时配合解决技术难题。3、软件系统运行稳定,易于操作上手,功能完善。4、了解视觉点胶机的生产工艺、生产情况、点胶情况,再根据自己的需求和成本去选择。这样才能找到品质过硬、价格合理、售后有保障的合作企业;" 视觉点胶系统搭配先进光源技术,确保产品图像清晰稳定。
在设计视觉点胶系统的路径时,需要考虑以下几个因素:点胶位置:首先确定点胶的目标位置,即将胶水应用到工件上的具体的位置。这需要考虑点胶的精度要求、工件的形状和尺寸等因素。点胶位置的准确性对于点胶系统的路径设计非常重要。动作顺序:确定点胶系统的动作顺序,包括运动路径和点胶动作之间的先后关系。操作人员需要考虑先后顺序,以确保点胶过程的连续性和有效性。通常,点胶路径设计应尽量避免重复移动和不必要的停顿。路径规划:路径规划是确定点胶系统如何从起始位置移动到目标点胶位置的过程。在路径规划中,需要考虑路径的非常短、非常快或较好化等目标,并避免与工件或其他障碍物的碰撞。例如,可以使用路径规划算法,如A*算法、Dijkstra算法等,来自动规划较好路径。视觉点胶系统的高精度运动控制,确保点胶位置误差极小。上海大视野视觉点胶系统公司电话
视觉点胶系统能自动识别产品缺陷,避免不良品流入下道工序。中山全景单工位视觉点胶系统制造商
视觉点胶系统的反应速度可以因应用和系统配置而有所不同。一般情况下,视觉点胶系统具有较高的响应速度,能够在毫秒级别内完成图像捕捉、分析和决策,并将结果发送给控制系统进行点胶操作。这种快速响应的能力对于自动化生产线上的精确点胶非常重要,以确保点胶位置的准确性和精度。视觉点胶系统的反应速度受多个因素影响,包括相机和图像处理算法的性能、控制系统的处理能力以及通信延迟等。现代的视觉点胶系统通常采用高性能的图像处理器和快速的通信接口,以实现快速的图像处理和数据传输,从而提高反应速度。此外,系统的硬件配置和优化、算法的优化和机械结构的设计也会对反应速度产生影响。中山全景单工位视觉点胶系统制造商
- 深圳引导视觉点胶系统咨询 2025-05-17
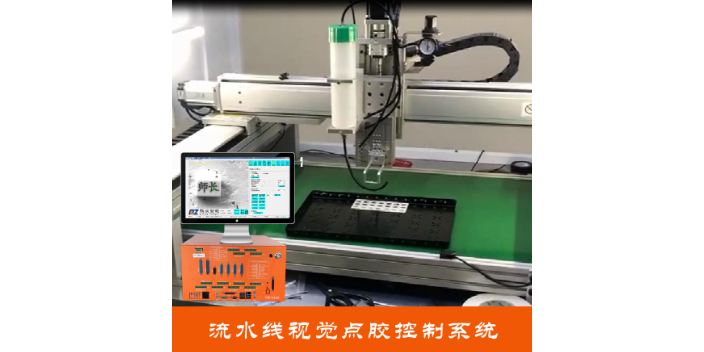
- 中山流水线视觉点胶系统费 2025-05-17
- 东莞R轴旋转视觉点胶系统厂家 2025-05-17
- 佛山引导视觉点胶系统单价 2025-05-17
- 中山全景单工位视觉点胶系统制造商 2025-05-17
- 惠州自动化视觉点胶系统公司 2025-05-17
- 佛山滴胶机视觉点胶系统价格 2025-05-16
- 中山在线式跟随视觉点胶系统哪里有 2025-05-16
- 中山在线视觉点胶系统哪家靠谱 2025-05-16
- 东莞机器视觉点胶系统 2025-05-16
- 四川酒店智能开关价格多少 2025-05-17
- 四川精密走心机品牌排行 2025-05-17
- 梅州物料智能仓库 2025-05-17
- 天津智能仓储管理系统是什么 2025-05-17
- 嘉兴无尾料切割机锯片 2025-05-17
- 河北自动化零点定位系统代理品牌 2025-05-17
- 杭州原装转子泵 2025-05-17
- 罗湖区国产变压器费用 2025-05-17
- 路桥精密切铝机工厂 2025-05-17
- 济南全自动电机装配设备厂家 2025-05-17