流水机器人点焊生产线安装
机器人点焊的工作原理主要依赖于电流通过焊接电极产生的热量来实现金属的熔化和结合。首先,机器人通过精确的运动控制,将焊接电极定位于待焊接的工件上。然后,电流通过电极流入工件,产生的热量使金属局部熔化,形成焊点。在这一过程中,机器人能够实时监测焊接参数,如电流、时间和压力,确保焊接过程的稳定性和一致性。焊接完成后,机器人迅速移动到下一个焊接点,极大地提高了生产效率。通过先进的传感器和控制系统,机器人能够适应不同的焊接任务,满足多样化的生产需求。通过技术创新,点焊生产线的效率不断提升。流水机器人点焊生产线安装

无锡帝木自动化系统科技有限公司的机器人点焊生产线,在工业自动化领域展现出了明显的优势,这些优势不仅提升了生产效率,还保证了产品质量的稳定性和一致性。智能监控:集成先进的物联网、大数据等技术,构建完善的智能管理系统。该系统能够实时采集生产数据,进行深度分析与挖掘,为企业提供生产效率、能耗、质量等多维度的可视化报告,帮助企业精细决策,优化生产流程。远程维护:通过远程监控与维护功能,企业可随时随地掌握生产线运行状态,快速响应故障处理,确保生产线的连续稳定运行。智能机器人点焊生产线多少钱自动化生产线的运行成本逐渐降低。
在智能制造的大背景下,无锡帝木自动化系统科技有限公司的机器人点焊生产线还融入了物联网、大数据等先进技术,构建了一套完善的智能管理系统。该系统能够实时采集生产数据,进行深度分析与挖掘,为企业提供生产效率、能耗、质量等多维度的可视化报告,帮助企业精细决策,优化生产流程。同时,通过远程监控与维护功能,企业可随时随地掌握生产线运行状态,快速响应故障处理,确保生产线的连续稳定运行。我们坚信,通过持续的技术创新与服务优化,无锡帝木将携手更多合作伙伴,共创智能制造的美好未来。
机器人点焊的工作原理主要基于电流通过金属材料产生热量,从而使金属在焊接点处熔化并结合。具体来说,机器人通过焊接将电流传导到待焊接的金属表面,形成一个局部的高温区域,使金属在此处熔化。焊接的移动和焊接时间由机器人控制系统精确调节,以确保焊接的质量和强度。在焊接过程中,机器人还可以通过传感器实时监测焊接状态,及时调整焊接参数,确保焊接过程的稳定性和可靠性。这种高精度的控制使得机器人点焊在复杂结构和强度高度材料的焊接中表现出色。点焊机器人在汽车行业的应用前景广阔。

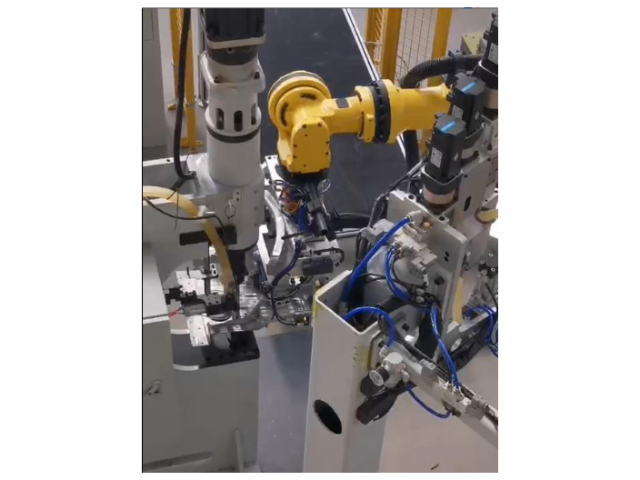
焊接段是机器人点焊生产线的中心工作段。在这个段落中,机器人使用焊接设备对原料进行焊接。焊接设备可以是电弧焊、激光焊或者其他类型的焊接技术。机器人根据预先设定的程序和路径,将焊接头按照要求进行焊接。焊接段通常需要高度精确的控制和监测,以确保焊接质量和焊接强度。质量检测段是机器人点焊生产线的关键工作段之一。在这个段落中,焊接完成的产品被送入质量检测设备进行检测和评估。质量检测设备可以使用非破坏性测试方法,如X射线检测或超声波检测,来检查焊接接头的质量和完整性。如果产品不符合质量标准,它将被标记为次品并进行后续处理。点焊机器人可以灵活应对不同的焊接需求。南通机器人点焊生产线
自动化生产线的设计考虑了人机协作。流水机器人点焊生产线安装
机器人点焊生产线在实际应用中也面临一些挑战。首先,不同产品的焊接要求可能不同,需要对机器人进行重新编程和调整。其次,焊接过程中可能会出现工件变形、焊接缺陷等问题,需要及时进行检测和修复。此外,机器人点焊生产线的维护和保养也是一个重要的问题。为了解决这些挑战,可以采取以下措施。首先,引入灵活的编程和控制系统,使机器人能够适应不同产品的焊接要求。其次,结合传感器技术,实时监测焊接过程中的变形和缺陷,并及时进行修复。此外,定期对机器人进行维护和保养,确保其正常运行。流水机器人点焊生产线安装
- 安徽机器人点焊自动化生产线 2025-07-16
- 湖北智能工厂自动化生产线管理系统 2025-07-16
- 辽宁智能自动化生产线检测 2025-07-16
- 辽宁流水自动化生产线上下料 2025-07-16
- 广西机器人制造自动化生产线管理系统 2025-07-16
- 福建机器人焊接自动化生产线哪家好 2025-07-16
- 山东自动化生产线管理系统 2025-07-16
- 湖北自动化生产线调试 2025-07-16
- 广西机器人自动化生产线解决方案 2025-07-16
- 浙江机器人自动化生产线集成商 2025-07-16
- 手套箱功能 2025-07-16
- 锡山区人工智能应用软件开发代理品牌 2025-07-16
- 江苏国产转子泵供应 2025-07-16
- 乳山质量奥的斯电梯特价 2025-07-16
- 安徽哪里有双冷源恒温恒湿机组参考价格 2025-07-16
- 安徽无异味电锅炉怎么卖 2025-07-16
- 内蒙古外丝弯头活结规格 2025-07-16
- 河北盘面650五轴加工中心安装 2025-07-16
- 山西蓄电池AGM隔板横切机价格 2025-07-16
- 福建浆液泵安装 2025-07-16