湖北中空编码器种类及型号
路用1个D触发器和2个与非门组成,计数电路用3片74LS193组成当光电编码器顺时针旋转时,通道A输出波形超前通道B输出波形90°,D触发器输出Q(波形W1)为高电平,Q(波形W2)为低电平,上面与非门打开,计数脉冲通过(波形W3),送至双向计数器74LS193的加脉冲输入端CU,进行加法计数;此时,下面与非门关闭,其输出为高电平(波形W4)。当光电编码器逆时针旋转时,通道A输出波形比通道B输出波形延迟90°,D触发器输出Q(波形W1)为低电平,Q(波形W2)为高电平,上面与非门关闭,其输出为高电平(波形W3);此时,下面与非门打开,计数脉冲通过(波形W4),送至双向计数器74LS193的减脉冲输入端CD,进行减法计数。由于各类型编码器价位差别很大,实际应用中选型不当既容易造成使用不合理,也会造成浪费。湖北中空编码器种类及型号

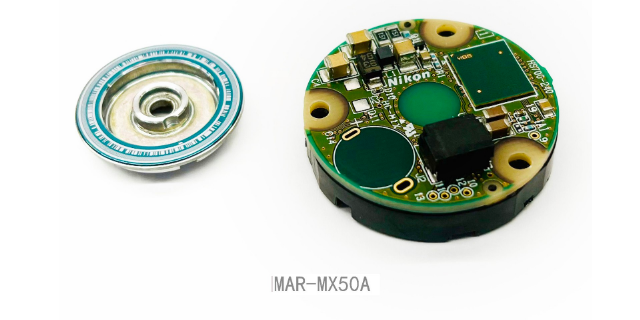
汽车方向盘顺时针和逆时针旋转时,其旋转角度均为两圈半,选用分辨率为360个脉冲/圈的编码器,其输出脉冲数为900个;实际使用的计数电路用3片74LS193组成,在系统上电初始化时,先对其进行复位(CLR信号),再将其初值设为800H,即2048(LD信号);如此,当方向盘顺时针旋转时,计数电路的输出范围为2048~2948,当方向盘逆时针旋转时,计数电路的输出范围为2048~1148;计数电路的数据输出D0~D11送至数据处理电路。实际使用时,方向盘频繁地进行顺时针和逆时针转动,由于存在量化误差,工作较长一段时间后,方向盘回中时计数电路输出可能不是2048,而是有几个字的偏差;MC52编码器一级代理实现了尼康**的无电池系统,与传统产品一样薄。
可同时获取编码器位置数据和温度数据。高温对应:工作温度上限可达95℃(双重电气电压搭载除外)。·通过磁石元器件检出多圈数。·断电时电池的消费电流极小。即使在马达轴运转的情况下,电池的消费流量也保持一定。·电池寿命可计算。·编码器内部始终在比较来自两个不同传感器的数据。从而,当编码器检出某处潜在故障时,会以错误表示的形式反馈给上位控制器,对装置或马达的失控起到防患于未然的作用。·磁气式多圈适用于小型AC伺服电机,小型机械臂,机器人使用的电机。分体磁气式多圈绝对值编码器:M50A分辨率(可选):20bit、22bit、24bit温度传感器:标配。
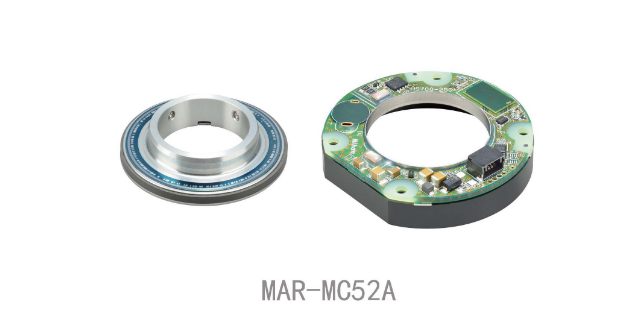
可同时获取编码器位置数据和温度数据。高温对应:工作温度上限可达95℃*EDLC(双重电气电容)搭载品除外。·大孔径中空型多圈绝对值编码器。·码盘通孔内径φ63毫米,满足不同现场的轴径需求。·为提高双臂机器人的设计自由度做出贡献。分离型中空绝对值编码器MC43A系列型号:MC43A系列MC43A系列分辨率(可选):20bit、22bit、24bit温度传感器:标配。MC43A系列分辨率(可选):20bit、22bit、24bit温度传感器:标配。可同时获取编码器位置数据和温度数据。高温对应:工作温度上限可达95℃*EDLC(双重电气电容)搭载品除外。“无电池方式”实现了与传统产品相同的薄度(“MAR-MX60A-MF”) MAR-MX60A-MF是一款划时代的绝对值编码器.
3.生产现场的各种电磁干扰源,对光电检测装置产生的干扰,导致光电检测装置输出波形发生畸变失真,使系统误动或引发生产事故。例如;光电检测装置安装在生产设备本体,其信号经电缆传输至控制系统的距离一般在20m~100m,传输电缆虽然一般都选用多芯屏蔽电缆,但由于电缆的导线电阻及线间电容的影响再加上和其他电缆同在一起敷设,极易受到各种电磁干扰的影响,因此引起波形失真,从而使反馈到调速系统的信号与实际值的偏差,而导致系统精度下降。Nikon 分体绝对值编码器 M50A系列 体积小、安装简单。 分体式的构造,减少了震动/冲击/高温,对PCB板的影响。山东中空编码器种类及型号
无需重大设计更改即可更换您当前的设备或编码器来开发新设备。湖北中空编码器种类及型号
但作为解决未来劳动力短缺和多品种小批量生产等生产问题的手段,协作机器人可以满足这样的需求,帮助人类在人机共存的应用场景中发挥作用。因此,协作机器人正在逐步引起人们的关注,并在更多的领域被投入适用。作为机器人类型之一是在装配工作和运输过程中,与人类在同一空间中协同工作的“协作机器人”。机器人无处不在的社会支持制造业的工业机器人伴随工业制造升级,必将进一步发展。迄今为止,从安全方面来看,人类和机器人一直在完全隔离的环境中工作,湖北中空编码器种类及型号
- 广西MAR-MX50A编码器一级代理 2025-05-23
- 山东MAR-MX50A编码器调试安装 2025-05-23
- 江苏中空编码器哪里有卖 2025-05-23
- SAR-ML50A编码器哪里有卖 2025-05-23
- 安徽MC43编码器代理商选哪家 2025-05-23
- 河北中空编码器应用领域 2025-05-23
- 中空编码器费用是多少 2025-05-23
- 湖北MAR-MX50A编码器哪家质量好 2025-05-23
- 中空编码器哪家质量好 2025-05-23
- MAR-M50A编码器有几种型号 2025-05-23
- Platinum Solo Twitter供应费用 2025-06-24
- 苏州防爆卷扬机厂家 2025-06-24
- 上海皮带张力仪测头 2025-06-24
- 亿日金属消声器接头型号怎么区分 2025-06-24
- 四川高效率制氮机推荐 2025-06-24
- 全自动化新能源汽车材料X荧光检测仪 2025-06-24
- 安顺实验楼生物走廊设计 2025-06-24
- 苏州新能源适配银浆无氧烤箱设备 2025-06-24
- 马鞍山汽车检测设备哪家好 2025-06-24
- 温州环保凹版印刷机定制 2025-06-24