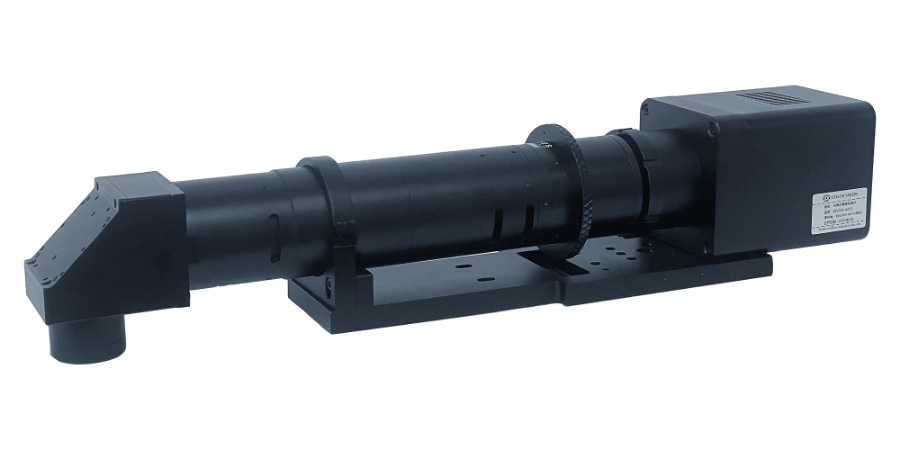
上海HUD抬头显示虚像测试仪
VR近眼显示测试结合眼动追踪技术,深度分析用户视觉焦点区域的显示效果。眼动追踪模块能精确捕捉用户在VR场景中的注视点,结合显示效果检测数据,分析焦点区域与非焦点区域的画质差异。在虚拟办公场景测试中,可发现用户注视文档文字时,文字区域的清晰度是否达标,而周边背景的模糊处理是否合理。通过统计用户在不同任务中的视觉停留时间,还能帮助厂商优化界面布局,将高频操作按钮放在视觉焦点易及区域。该技术让VR显示优化从“平均用力”转向“精确聚焦”,明显提升关键信息的传达效率。基于微透镜阵列波前分割的虚像距测量方法,能有效提升虚像距测量精度 。上海HUD抬头显示虚像测试仪
AR光学因需实现虚拟与现实融合,检测逻辑与VR存在明显的差异。其方案如光波导、自由曲面棱镜等,需重点检测透光率、眼动追踪精度、环境光干扰抑制能力,以及双目视差校准的一致性。以HoloLens为例,光学成本占比达47%,检测需覆盖微米级波导纹路精度、衍射效率均匀性,以及摄像头与光学系统的空间坐标系校准。此外,AR头显的轻量化设计(如单目/双目配置、分体式结构)对光学元件的小型化与集成度提出挑战,检测需兼顾微型化元件的表面缺陷(如亚微米级划痕)与整体光路的像差控制,确保在工业巡检、教育交互等场景中实现精确虚实叠加。VR光学测量仪工具AR 测量软件不断更新,测量功能更丰富,测量结果更准确 。

VR测量仪是基于虚拟现实(VR)技术构建的智能化测量系统,通过集成光学成像、深度感知、三维建模等技术,实现对物理对象的高精度数字化测量与虚拟重构。其原理是利用双目立体视觉模拟人类双眼视差,结合结构光投射、激光扫描或ToF(飞行时间)传感器获取物体表面的三维坐标数据,再通过算法构建1:1比例的虚拟模型,然后输出几何尺寸、空间位置、表面纹理等多维度测量结果。典型设备如基恩士VR-6000系列,可在0.1秒内完成80万点的三维点云数据采集,分辨率达0.1微米,支持对复杂曲面、深腔结构、柔性物体的非接触式测量。
虚像距测量设备采用非接触式检测,避免对精密光学系统造成物理损伤。传统接触式测量需要将检测探头贴近光学镜头,可能刮伤镜头表面或改变光学元件的位置精度。非接触式检测通过激光遥感和图像识别技术,在距离设备30-50cm处完成测量,全程不与设备发生物理接触。在检测VR头显的光学模组时,能避免因接触导致的镜头偏心或镀膜损伤;检测精密HUD光学系统时,不会影响其内部透镜的相对位置精度。非接触式设计既保护了昂贵的光学设备,又确保了测量数据的准确性,特别适用于高精度光学系统的检测场景。MR 近眼显示测试通过模拟真实视觉场景,多方面评估设备性能,保障用户体验 。
VR近眼显示测试引入动态追踪算法,精确评估快速移动场景下的画面稳定性。在VR游戏或虚拟训练中,用户头部快速转动时,画面若出现拖影或撕裂,会严重影响沉浸感。该测试系统的动态追踪算法能实时捕捉头显运动轨迹,同步记录画面帧变化,计算出运动模糊程度和帧丢失率。测试时,系统模拟每秒30度的头部转动速度,持续采集画面数据,生成动态稳定性报告。例如,在VR滑雪游戏测试中,可检测出高速下滑时雪景画面的拖影长度,当拖影超过2像素时,提示厂商优化渲染引擎,确保用户在激烈运动场景中仍能获得流畅体验。VR 测量借助先进传感器,精确捕捉空间数据,为虚拟场景构建提供可靠尺寸依据 。上海AR影像测量仪代理
HUD 抬头显示虚像测量适应复杂驾驶环境,稳定提供信息 。上海HUD抬头显示虚像测试仪
虚像距测量面临三大关键挑战:虚像的“不可见性”:虚像无法直接成像于屏幕,需依赖间接测量手段,导致传统接触式方法(如标尺测量)失效,对传感器精度与算法鲁棒性要求极高。复杂光路干扰:在多透镜组合系统(如变焦镜头、折叠光路Pancake模组)中,虚像位置受光阑位置、镜片间距等多参数耦合影响,微小装配误差(如0.1mm偏移)可能导致虚像距偏差超过10%,需建立高精度数学模型进行误差补偿。动态场景适配:对于可变焦光学系统(如人眼仿生镜头、AR自适应调节模组),虚像距随工作状态实时变化,传统静态测量方法难以满足动态校准需求,亟需开发高速实时测量技术(响应时间<1ms)。上海HUD抬头显示虚像测试仪
- 浙江NED近眼显示测量仪软件 2025-07-03
- AR/VR测试仪货源 2025-07-03
- AR激光测量仪价格 2025-07-03
- 江苏AR近眼显示测量仪使用方法 2025-07-03
- 上海VR测量仪精度 2025-07-03
- 江苏AR/VR测试仪 2025-07-03
- 江苏虚拟现实AR光学测量仪厂家 2025-07-03
- 江苏AR光学测量仪应用 2025-07-03
- 江苏VR影像测试仪维修 2025-07-03
- AR近眼显示测量仪代理 2025-07-03
- 永康制造压铸件工厂 2025-07-06
- 辽宁6抽工具车制造商 2025-07-06
- 深圳拉线冷藏车离合器 2025-07-06
- 四川发黑热处理加工 2025-07-06
- 湖州可追溯虎克HK32-002液压站 2025-07-06
- 上海旋转吊环哪家好 2025-07-06
- 广州电子锁塑料模具订做 2025-07-06
- 吉林各种型号定制膨胀管模具销售厂家 2025-07-06
- 安徽氮气高压空压机厂家报价 2025-07-06
- 浙江手动打胶枪各种比例 2025-07-06