江苏微型伺服电动缸
伺服电动缸作为工业自动化领域的中心组件,其作用在于将电能高效转换为直线运动,实现机械部件的精确定位与运动控制。其工作原理基于伺服电机与丝杠机构的结合,伺服电机接收控制信号后,驱动丝杠旋转,进而将旋转运动转换为直线运动。通过闭环控制系统,伺服电动缸能够实时反馈位置、速度和力的大小,确保运动精度和稳定性。在自动化装配线、机器人手臂等场景中,伺服电动缸以其高精度、高响应速度,卓著提升了生产效率和产品质量。步进伺服电动缸结合步进电机,实现精确步进运动。江苏微型伺服电动缸

直线伺服电动缸以其直接、高效的直线运动方式,普遍应用于各种需要直线推拉的设备中。其作用在于实现直线运动的精确控制,提高设备的运行效率和稳定性。工作原理上,直线伺服电动缸通过伺服电机直接驱动丝杠或滑轨,将旋转运动转换为直线运动,无需中间转换机构,减少了能量损失和运动误差。在物料搬运、模具控制等领域,直线伺服电动缸的应用极大地提高了设备的自动化水平和运行效率,成为现代工业不可或缺的关键设备之一。进口伺服电动缸通常来自技术靠前的国家或地区,以其卓著的性能和品质保证在工业自动化领域占据一席之地。其作用在于提供高精度、高可靠性的直线运动控制解决方案,满足对设备性能要求极高的应用场景。工作原理上,进口伺服电动缸采用先进的伺服电机技术、精密的传动机构和优化的控制算法,实现了运动性能的发挥。在装备制造、精密加工等领域,进口伺服电动缸以其出色的表现,成为用户优先选择的产品之一。南京伺服电动缸价钱物料搬运伺服电动缸实现物料快速、准确搬运。
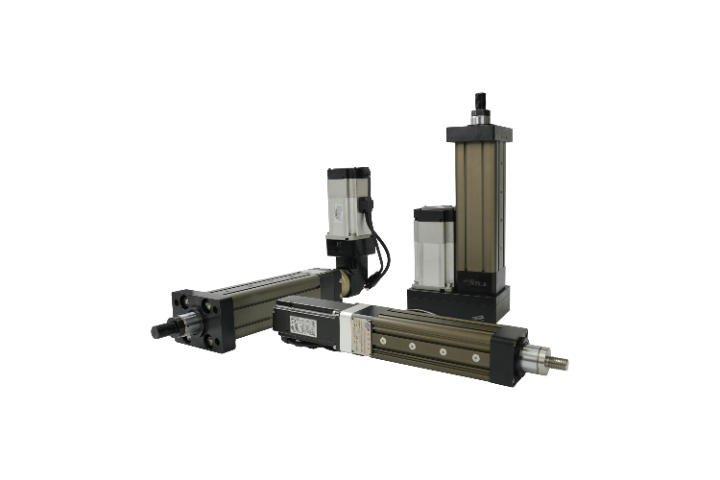
大吨位伺服电动缸以其强大的推力输出,成为重载机械、大型设备驱动系统的优先选择。其作用在于提供足够的动力,确保设备在重载或高阻力环境下的稳定运行。工作原理上,大吨位伺服电动缸采用大功率伺服电机和强化型传动机构,通过优化机械结构和控制算法提高推力输出和稳定性,为重载工业设备的高效运行提供了可靠保障。人形机器人伺服电动缸在人形机器人领域发挥着关键作用,其作用在于模拟人类关节的运动,实现机器人的灵活行走、抓取等动作。工作原理上,人形机器人伺服电动缸通常采用高精度、高响应速度的伺服电机和轻量化、比较强度的传动机构,结合先进的运动控制算法,实现机器人关节的精确控制和协调运动,为人形机器人的智能化发展提供了有力支持。
在钢铁连铸过程中,伺服电动缸用于驱动结晶器振动装置、拉矫机等关键设备,实现连铸工艺的精确控制。其高精度、高响应速度的特点能够确保连铸过程的稳定性和效率,提高铸坯的质量和产量。伺服电动缸的闭环控制系统能够实时反馈运动状态,调整输出参数,确保连铸工艺的优化和稳定。此外,其高可靠性和长寿命也降低了钢铁企业的维护成本,提升了企业的经济效益。物料搬运领域对设备的自动化水平和效率要求极高,伺服电动缸在这一领域发挥着重要作用。它用于驱动输送带、堆垛机、AGV等设备,实现物料的自动搬运和存储。伺服电动缸的高精度控制能够确保物料搬运的准确性和稳定性,提高物流效率。同时,其灵活多变的运动方式也适应了不同物料搬运场景的需求,为物流行业带来了卓著的经济效益。直线式伺服电动缸与直线导轨配合,实现平稳直线运动。
折返伺服电动缸通过特殊的机械结构,在有限空间内实现了往复直线运动,特别适用于对空间要求苛刻的场合。其作用在于节省空间的同时,保持高效的运动性能。工作原理上,折返伺服电动缸采用折返式丝杠或连杆机构,将电机的旋转运动转换为直线往复运动。这种设计不仅减小了整体尺寸,还通过优化机械结构提高了运动效率和稳定性,普遍应用于精密仪器、电子设备内部驱动等领域。六自由度伺服电动缸通过集成多个运动轴,实现了空间内任意方向和角度的运动控制,为机器人、仿真模拟等领域提供了高度灵活的运动解决方案。其作用在于构建复杂运动系统,满足各种复杂任务的需求。工作原理上,六自由度伺服电动缸由多个独自的伺服电动缸和旋转关节组成,通过协同工作实现复杂的空间运动。这种设计使得机器人等设备能够灵活应对各种复杂环境,提高了自动化水平和适应性。防水伺服电动缸适应潮湿环境,确保设备正常运行。南京伺服电动缸价钱
伺服电动缸的编码器反馈实现运动状态的实时监测。江苏微型伺服电动缸
伺服电动缸作为工业自动化领域的中心组件,其作用在于将电能高效转换为直线运动,实现机械部件的精确定位与运动控制。其工作原理基于伺服电机与丝杠机构的紧密结合,伺服电机接收控制信号后,驱动丝杠旋转,进而将旋转运动转换为直线运动。通过闭环控制系统,伺服电动缸能够实时反馈位置、速度和力的大小,确保运动精度和稳定性。在自动化装配线、机器人手臂等场景中,伺服电动缸以其高精度、高响应速度,卓著提升了生产效率和产品质量,成为现代工业不可或缺的关键设备。江苏微型伺服电动缸
- 江西电缸结构 2025-06-27
- 青岛六自由度平台咨询 2025-06-27
- 阀门控制电缸生产厂家 2025-06-27
- 成都高精度伺服电动缸 2025-06-27
- 郑州重工机械六自由度平台 2025-06-27
- 惠州电缸控制 2025-06-27
- 杭州六自由度平台 2025-06-27
- 贵州伺服电动缸用途 2025-06-27
- 苏州耳轴电缸 2025-06-27
- 深圳六自由度平台型号 2025-06-27
- 广东国产汽车铝型材结构件怎么样 2025-06-27
- 石家庄钐铁氮注塑磁厂家电话 2025-06-27
- 湖北定制化固晶机生产厂商 2025-06-27
- 辽宁联动式升降平台定制 2025-06-27
- 山西换热器U形管焊机大概价格 2025-06-27
- 贵州无接触空中成像无接触交互 2025-06-27
- 徐州检测实验室装修设计公司 2025-06-27
- 湖北立式开箱机选择 2025-06-27
- 合肥并联六轴机器人怎么样 2025-06-27
- 山东衬氟风阀 2025-06-27