北京精密力控打磨欢迎咨询
在研磨加工中企业为了快速投产,通常用机器人来实现打磨作业,机器人打磨采用了DFC力控打磨系统,以及打磨工具、自动换砂纸设备。可以替代人工和去毛刺的机床设备,用于对铸件、钣金件、洁具、电脑笔记本、手机等壳体的打磨、去毛刺自动化加工。加装D力控打磨的机器人研磨自动化系统从加工零件和产品的表面快速有效地去除多余的材料。无论在什么行业,批量生产中有打磨工序,就不能没有自动化设备,而打磨工艺作业的非标准性及对打磨动作的灵活要求,成为通用打磨机的技术障碍。将打磨机、力控打磨系统DFC和机器人结合成为单个机器人打磨系统或完整的机器人打磨设备,辅以传输线和相应的夹具技术研发成完整的打磨工序自动化生产线,可高效完成非标准件的自动化力控打磨作业工艺。对不同材质的零件进行精密打磨本身就是一门科学。它要求生产商配备自动化力控打磨机、力控打磨系统、设备和生产线、打磨过程的专业知识、适当的打磨技术以及正确的打磨工序。大儒科技(苏州)有限公司力于提供力控打磨 ,有想法的不要错过哦!北京精密力控打磨欢迎咨询

大规模量产性能好等特点,在电子电器、通信、汽车工业、医疗器械等领域应用较多,例如在电脑机箱、手机、mp3中,钣金是必不可少的组成部分,钣金件的设计变成了产品开发过程中很重要的一环,在对钣金进行打磨过程中,会产生大量的细尘飞扬,这些细尘飞扬严重影响工作环境,而且细尘容易被吸入工作者的身体内,对工作者的身体健康造成影响,并且如今的钣金打磨机对圆形钣金件不能很好的固定,如果打磨时钣金件固定不稳,容易造成安全事故。DFC力控打磨使得钣金加工过程实现柔性力控打磨,解决打磨自动化。对比柔性力控打磨的施工工艺――柔性力控打磨提供更加环保、安全的工作环境,打磨后工件批量表面光滑、细腻、平整,效果更加均匀、一致,配合使用不同粒度砂纸,达到钣金焊缝打磨贺表面砂光打磨效果。洛阳精密力控打磨共同合作力控打磨 ,就选大儒科技(苏州)有限公司,用户的信赖之选,欢迎新老客户来电!
机器人自动化打磨抛光适用于各种类型工件和材料打磨抛光工艺的各个方面,常规复杂形状工件的抛光需要由人工完成,加工效率低、产品一致性难以保证、生产人员工作环境恶劣,同时管理成本较高,随着用工成本和技工不确定性风险的上市,利用人口红利创造产品利润的时代已经结束。自动化打磨方式使用先进DFC力控制技术使得打磨力控打磨能够处理各种复杂形状的工件,并且保证了工件的加工质量和产品的一致性。通过在机器人上的DFC力控打磨执行器,以及线性链接的DFC力控打磨控制器,结合工件与打磨工具的磨损消耗计算方程,使得系统能够实现复杂磨削,随形抛或安装三维数模尺寸抛都成为可能。实时反馈并控制打磨力在设定范围内,在线质量控制等功能,极大地提高了产品加工效率,并保证了加工工件的质量高度一致性。
加工后的工件往往前后品质不一,公差各不相同,难以得到安定的工艺效用。关于繁杂结构的铸件、毛刺散布分散的铸件也能对应。而且机器人具可编程性,新的产品导入只需要改换工装治具,次序切换就能完成。这使装置具更高的柔性化,更适当目前企业的需要。同机遇器人去毛刺的方案能增加工友休息强度或间接省去工友,无效确保加工质量分歧性,进步全体消费效率,改善工厂任务环境。这些劣势都是很明显的,纵使装置投入本钱略高,也越来越多被企业背负。随着机械人力控技术的发展,浮动部门和打磨工具的使用,如同人手滑过铸件毛刺般开展柔性除去毛刺,能有效性避免导致打磨工具和铸件的损坏,吸收铸件及定位等各方面的误差。力控打磨由二种先进的基本机能构成。一种是压力控制机能,当机器人展开工件打磨抛光时,该机能可维持打磨工具对铸件的压力自始至终不变:另一种是变速控制功用,当机器人对工件的表面或分型线展开去毛刺、去飞边操作时,该机能可持续操纵其操作速度。力控打磨 大儒科技(苏州)有限公司获得众多用户的认可。

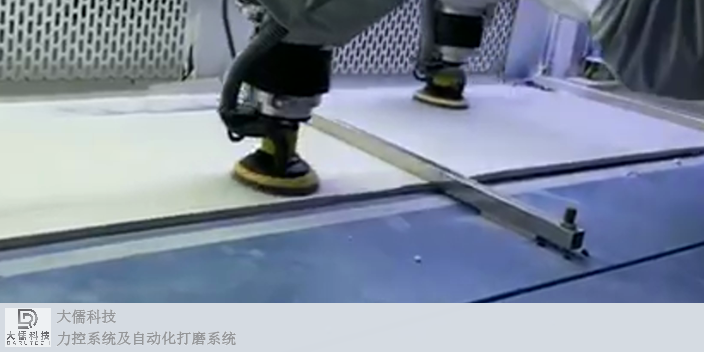
为保证打磨抛光效果得到有效保证,使用DFC智能力控打磨力控打磨来实现批量打磨。在DFC力控打磨执行器末端安装上客户原有的打磨抛光工具即可实现力控打磨的柔性执行。例如在DFC力控打磨末端安装角磨机实现焊缝打磨或者焊渣清理。可以根据需要安装千叶片或着不锈钢碗刷;安装千叶片可以进行焊接飞溅的打磨、表面磕碰划伤的打磨、焊缝余高的磨平及加工余高的打磨等工作;安装不锈钢碗刷可以进行长大焊缝的打磨,主要作用是去除焊接区域的氧化皮。打磨焊缝表面不得有裂纹、焊瘤、烧穿、弧坑沙眼等缺陷。抛光后焊缝不得有表面气孔、夹渣、弧坑、裂纹、电弧擦伤、打火等缺陷。更换抛光机实现的磨抛效果,用布轮把不锈钢产品抛光成有光泽的表面或焊接部位打磨后抛光。抛光前需要把产品表面打砂处理,不能显亚光感觉,抛光后焊接表面不得有气孔、夹渣、弧坑、裂纹、电弧擦伤、打火等缺陷。大儒科技(苏州)有限公司为您提供力控打磨 ,期待为您服务!安徽购买力控打磨欢迎咨询
大儒科技(苏州)有限公司为您提供力控打磨 ,欢迎您的来电哦!北京精密力控打磨欢迎咨询
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。北京精密力控打磨欢迎咨询
- 广州力控系统给您好的建议 2025-05-20
- 官方授权经销力控系统详情 2025-05-20
- 合肥柔性打磨方案 2025-05-20
- 正规柔性打磨代理商 2025-05-19
- 北京力控系统厂家现货 2025-05-19
- 打磨力控系统值得信赖企业 2025-05-19
- 四川智能化力控系统 2025-05-19
- 盐城柔性打磨答疑解惑 2025-05-19
- 浙江什么是力控打磨研磨 2025-05-19
- 常熟柔性打磨欢迎咨询 2025-05-19
- 福建食品行业层流罩风速调节方法 2025-06-20
- 河北抓斗激光扫描欢迎选购 2025-06-20
- 惠州防洪闸应急物资 2025-06-20
- 武汉购买防爆卷扬机 2025-06-20
- 杭州code readervericode 2025-06-20
- 杭州灌胶机 2025-06-20
- 松江区常规波峰焊接 2025-06-20
- 浙江直埋ADSS光缆 2025-06-20
- 常州磨床自动上下料案例 2025-06-20
- 宿迁ERP系统定制开发 2025-06-20