成都品质力控打磨答疑解惑
2-3)和气动平行夹爪(2-6),具有与工件外形相同形腔的仿形定位座(2-3)通过支承柱(2-8)安装在底板(2-5)上,仿形定位座(2-3)内设有空腔,安装在底板(2-5)上的气动平行夹爪(2-6)设置在仿形定位座(2-3)的空腔内,且气动平行夹爪(2-6)上具有用于夹住工件的夹头(2-7),底板(2-5)通过紧固件和定位销(2-4)安装在托盘(3-6)对应的螺纹孔和销孔(3-5)内。2.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的工作台(1)沿其周边设有框架(1-1),工作台(1)上部的框架(1-1)两侧及后部设有可移动的透明有机玻璃板(1-2),框架(1-1)前部的两立柱上安装有光栅(1-3),工作台(1)下部的框架(1-1)四周设有侧板(1-5),且工作台(1)下部的空腔用于安装控制箱及电气元器件,侧板(1-5)上设有散热器(1-6),工作台(1)前部设有内凹的前储物仓(1-4)和操作面板。3.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的固定夹座(5-2)设有用于安装气磨(5-3)或电磨的安装孔,且固定夹座(5-2)的一侧设有与安装孔相通的槽口,固定夹座(5-2)设有贯穿槽口的连接孔,固定夹座(5-2)的安装孔内设有防止气磨(5-3)或电磨旋转的凹槽,气磨。大儒科技的打磨力控系统的可以支持:ProfiNet , TCP/IP和I/O通信。成都品质力控打磨答疑解惑
目前我国的打磨抛光方法仍然以手工打磨、手工抛光为主,不仅劳动强度大,加工效率低,对工人技术熟练程度要求高,而且是工人职业病高发领域。因此,自动化打磨抛光设备的大量应用是实现“机械换人”,推动传统制造业实现技术转型升级的重要途径。自动化打磨抛光设备主要由进给系统和打磨抛光头组成,进给系统如关节机器人、直角机器人、并联机构及机床的伺服进给系统等,目前较为成熟和可靠。目前打磨抛光头相对较为粗糙,一般只有打磨抛光的执行机构,缺乏可靠的控制系统和传感系统,无法实现恒力磨削,与进给系统缺乏相互作用、反馈的交互性,无法实时调整,致使现在的自动化打磨抛光设备适应面较窄,无法应对打磨抛光时遇到的各种复杂情况。针对现有技术中存在的上述不足之处,智能柔性打磨力控系统的执行器完成柔性力控制的浮动磨削,通过力控与视觉系统对打磨情况进行感知,反馈给进给系统做出实时调整;采用可自由伸缩的打磨头、被动调整装置、海绵垫等增加打磨效率的同时单、双、三打磨头作业的自由切换可适应有不同需求的场合。韶关通用力控打磨来电咨询你了解智能柔性打磨力控系统吗?
因六关节机器人在定位精度、运动耦合方面表现出极大的优势,且工作空间大、工件易于夹持,其在自动化打磨应用中,包括抛光、打磨、去毛刺等方面的应用越来越普遍,但同时也面临许多挑战:1)打磨过程是一个复杂的工艺过程,对其机理的研究还不够深入,使得自由曲面的打磨加工成为模具生产、制造中的薄弱环节和制约模具制造业发展的瓶颈;2)待加工表面复杂多样,需要一种灵活的、适应性强的方式来控制打磨的精度。目前,打磨行业里应用机器人仍主要采用示教的方式,通过离线移动机器人到达目标点,然后通过机器人编程语句逐点记录。其中,为了得到要求的表面加工精度,还需要操作人员在过渡处插补点位以光顺过渡调整机器人的位姿。要完成一个复杂件的打磨作业,需要数天的示教及调试,容易出错,且对操作人员的熟练程度要求很高。
市场上通常力传感器与机器人来实现柔性打磨。机器人中的力传感器主要分为两类:关节部位的单轴扭矩传感器和机器人末端的6轴力传感器。其中国产的力传感器价格适中,性能也不错,量程50Nm的5000左右,跟HD的谐波减速器价格相当,很多企业能够接受。因为伺服系统中的位置传感器精度非常高,力矩传感器远没有位置传感器那样高精度,力矩传感器信号标准差为。另外,机器人中安装有力矩传感器,有一个比较大的缺陷:刚性降低,当系统中装有力矩传感器后,传动链上会有明显的变形,也即系统的刚性相比于没有力矩传感器的,会下降很多。经过粗略计算,一块与力矩传感器大小一样的钢板,其刚性是它的近10倍。我们知道,传统机器人在做位置控制时,是希望传动刚性伟大越好的。当刚性过低时,不光是控制精度下降,系统也容易不稳定。另外通过只控制电机端完成一定的位置轨迹追踪,同时测量出力矩传感器的信号,得出信号质量并不是很好,这跟系统刚性下降有关。这是由于电机端的运动,经过中间的弹簧后,再传到连杆端;由于弹簧刚性系数较其他部分小很多,导致电机运动经由弹簧后产生了波动,进而导致电机与连杆间的偏差角有波动,使得测量的力矩不够稳定。这种不稳定的力矩信号。打磨力控系统支持打磨抛光工艺简化,检测、打磨抛光效率自主优化和磨料损耗自动监测。

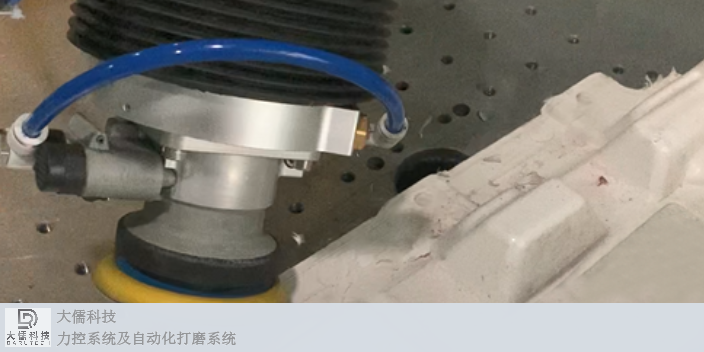
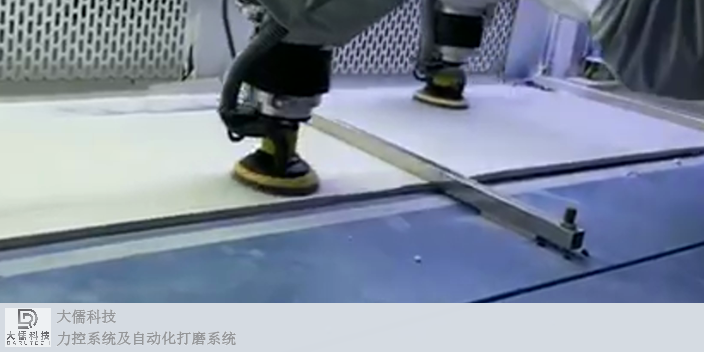
常规钣金箱体焊缝打磨项目简单描述:1.钣金箱体焊接成型后,必须将焊缝磨平。2.箱体焊接后变形,尺寸差异大,且工件装夹精度差。3.一般箱体为多面体,需要多角度打磨。大儒科技智能柔性打磨力控制系统解决方案大儒科技的的力控系统是用于力控打磨,机器人只需要按照示教轨迹做运动,柔性力由力控系统自行完成,用户输入所需要的力值,即可轻松实现智能力控打磨。大儒科技的智能柔性打磨力控系统(ForceControlSystemofintelligentflexiblesaning,简称DFC),前端可搭载多种工具,如气磨机、角磨机、直磨机、砂带机、拉丝机、旋转锉等,适用于不同的应用场景。更多案例访问官网:车窗框焊缝打磨、新能源电池框打磨、新能源电池电极打磨、新能源电池护板打磨等。打磨力控系统在力控的浮动范围内可以将迅速调整到设定力。韶关通用力控打磨来电咨询
打磨力控系统可以实现智能打磨生产中工件打磨表面效果取得一致。成都品质力控打磨答疑解惑
智能柔性打磨力控系统应用于批量性中小工件去毛刺、去飞边、倒棱角、除锈、去氧化皮、电镀前处理、及去除加工刀纹、工件表面光亮抛光,镜面抛光等。特别适合一些形状复杂、微型精密零件、异型易变形薄臂、窄缝、薄片工的件抛光难题。智能柔性打磨力控系统对大优点是,在打磨抛光过程中柔性控制打磨力的大小,抛光后不改变工件尺寸精度,外观及手感显著提高,是一些手工抛光、或进口抛光设备无法达到的抛光效果。目前已经应用于中小型零件批量生产加工,完全取代了落后的传统抛光工艺,抛光效率、效益提高。智能柔性打磨力控系统已泛用于机械制造、电子零部件、仪表仪器、轻工、钟表零件、航天、纺织器材专件、汽车零部件、轴承行业、医疗器械、精密件、粉末冶金、五金冲压、工艺品、工具等多种行业领域。对于中小型精密工件去毛刺、去飞边、倒角、除锈、去氧化皮、去除加工纹痕、抛光、精抛光、镜面抛光等性能显著提高,可完全取代或超越昂贵的进口抛光设备,国内众多生产型企业直接受益。大儒科技是以研发、生产、销售为一体的科技型企业,致力于智能柔性打磨力控系统的研发、设计、生产,专业解决各种工件抛光技术难题。成都品质力控打磨答疑解惑
大儒科技(苏州)有限公司是一家服务型类企业,积极探索行业发展,努力实现产品创新。公司是一家私营有限责任公司企业,以诚信务实的创业精神、专业的管理团队、踏实的职工队伍,努力为广大用户提供***的产品。公司业务涵盖力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人,价格合理,品质有保证,深受广大客户的欢迎。大儒科技将以真诚的服务、创新的理念、***的产品,为彼此赢得全新的未来!
- 广州力控系统给您好的建议 2025-05-20
- 官方授权经销力控系统详情 2025-05-20
- 合肥柔性打磨方案 2025-05-20
- 正规柔性打磨代理商 2025-05-19
- 北京力控系统厂家现货 2025-05-19
- 打磨力控系统值得信赖企业 2025-05-19
- 四川智能化力控系统 2025-05-19
- 盐城柔性打磨答疑解惑 2025-05-19
- 浙江什么是力控打磨研磨 2025-05-19
- 常熟柔性打磨欢迎咨询 2025-05-19
- 甘肃终端过滤器IVC笼具 2025-06-22
- 天津铣床销售厂家 2025-06-22
- 手动电气柜特点 2025-06-22
- 深圳购买喷水推进器调试 2025-06-22
- 淮南冰源冷冻活塞机组设计 2025-06-22
- 浙江5万吨石膏煅烧预处理 2025-06-22
- 安徽哪里有土石方工程施工价格实惠 2025-06-22
- 温州无人售货机欢迎来厂考查 2025-06-22
- 上海波轮洗衣机市场价格 2025-06-22
- 天津三相交流电机功率 2025-06-22